Описание

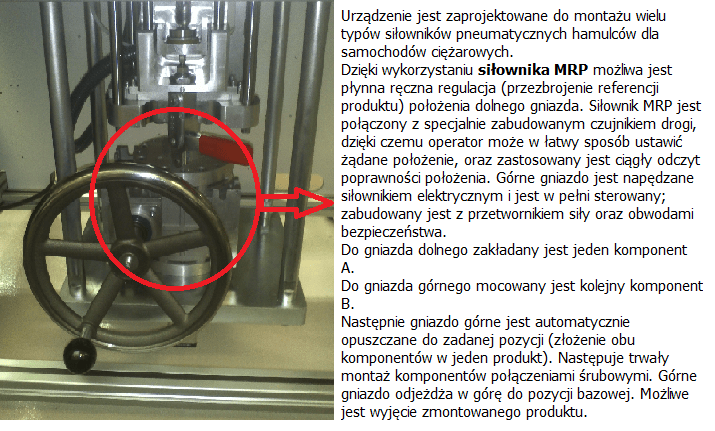
 Механизм наведения. Приводы RP определяют угол поворота спутника относительно вертикальной оси и наклон спутниковой антенны по горизонтальной оси в направлениях вперед-назад.
Механизм наведения. Приводы RP определяют угол поворота спутника относительно вертикальной оси и наклон спутниковой антенны по горизонтальной оси в направлениях вперед-назад.
Высокая точность настройки отклонения винта цилиндра в этом случае позволяет очень точно позиционировать антенну.
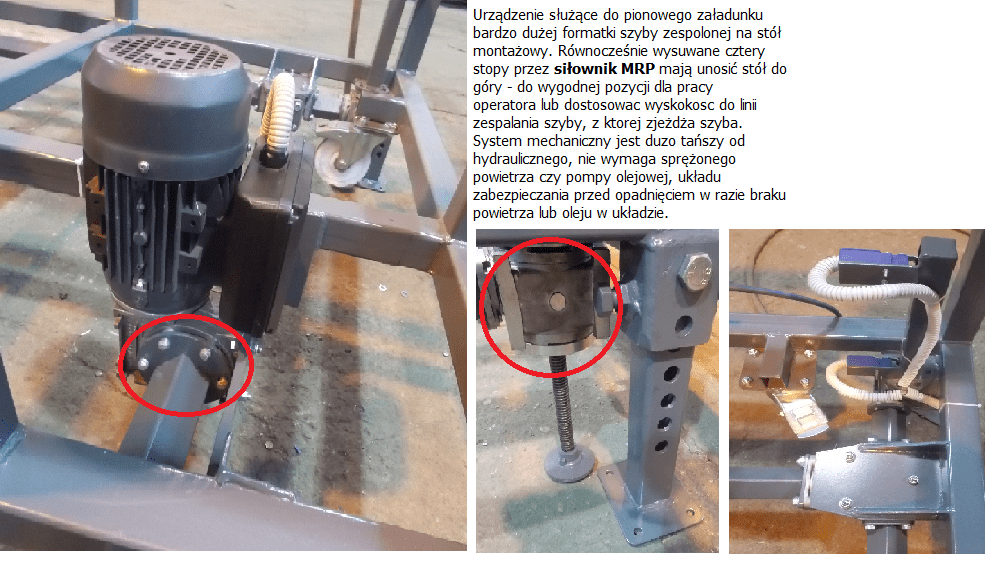
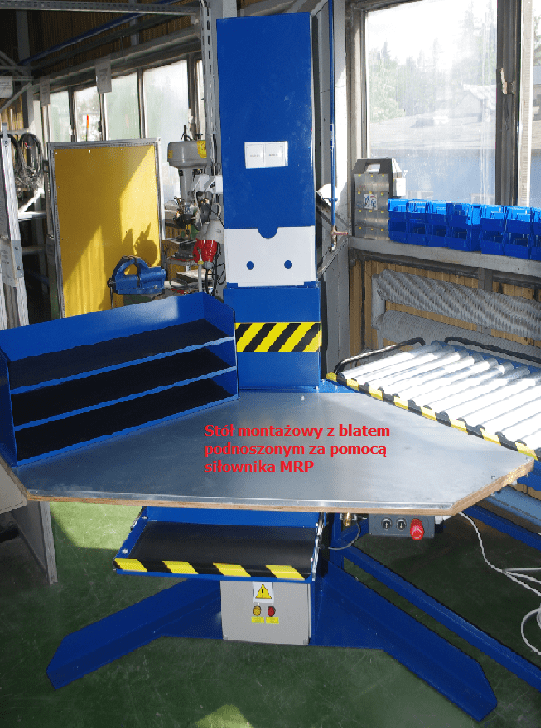
 Четырехколонный лифт. Регулируемая по высоте рабочая поверхность позволяет загружать ее элементами, когда она находится внизу (где это потенциально легче), а затем позволяет поднимать стол на удобную высоту, например, для обработки продукта или для его сборки.
Четырехколонный лифт. Регулируемая по высоте рабочая поверхность позволяет загружать ее элементами, когда она находится внизу (где это потенциально легче), а затем позволяет поднимать стол на удобную высоту, например, для обработки продукта или для его сборки.
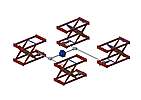
 Ножничный подъемник. Один привод для каждой позиции позволяет изменять высоту рабочей поверхности. Простая конструкция и несколько движущихся частей позволяют дублировать положения простым и экономичным способом с возможной механической синхронизацией.
Ножничный подъемник. Один привод для каждой позиции позволяет изменять высоту рабочей поверхности. Простая конструкция и несколько движущихся частей позволяют дублировать положения простым и экономичным способом с возможной механической синхронизацией.
 Подъем колонны. Серводвигатель MRP в исполнении SO (поворотный болт) переносит нагрузки на подвижную часть подъемника. Если подвижный элемент направлен должным образом, винт не должен поддерживаться снизу. Подшипник привода передает нагрузку на устойчиво установленный корпус.
Подъем колонны. Серводвигатель MRP в исполнении SO (поворотный болт) переносит нагрузки на подвижную часть подъемника. Если подвижный элемент направлен должным образом, винт не должен поддерживаться снизу. Подшипник привода передает нагрузку на устойчиво установленный корпус.
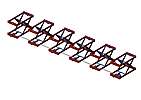 Многоступенчатый ножничный подъемник. Обширная версия ранее упомянутого решения. Можно использовать несколько приводов для уменьшения их размеров при сохранении грузоподъемности. Двойной набор кронштейнов увеличивает диапазон подъема столешницы.
Многоступенчатый ножничный подъемник. Обширная версия ранее упомянутого решения. Можно использовать несколько приводов для уменьшения их размеров при сохранении грузоподъемности. Двойной набор кронштейнов увеличивает диапазон подъема столешницы.
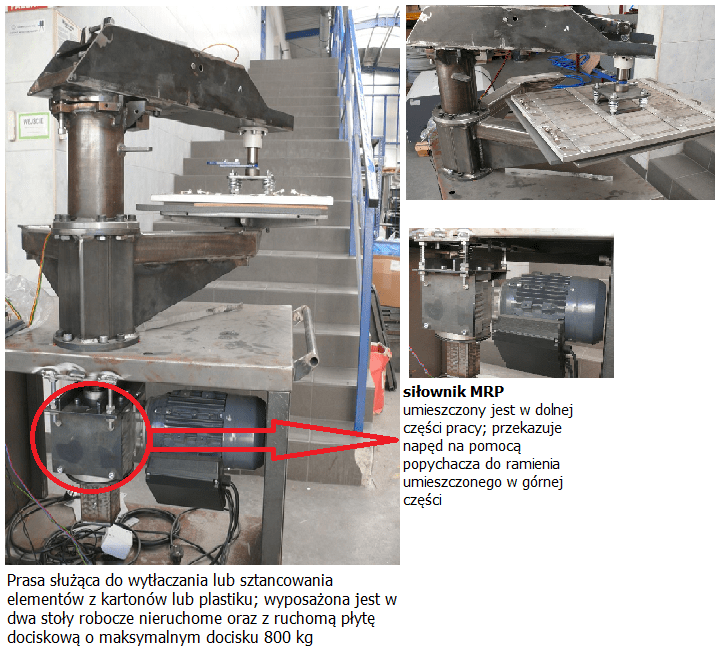
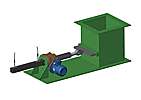
 Компактная печать. Замена гидравлического пресса с приводом / комплектом привода и корпусом. Простая и компактная конструкция обеспечивает простоту обслуживания и возможность быстро переключать передачи в коробке передач или заменять любой из элементов новым.
Компактная печать. Замена гидравлического пресса с приводом / комплектом привода и корпусом. Простая и компактная конструкция обеспечивает простоту обслуживания и возможность быстро переключать передачи в коробке передач или заменять любой из элементов новым.
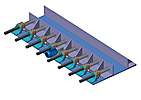 Горизонтальный пресс. Устройство большого размера для укладки / соединения / сжатия больших элементов, таких как бетонные колонны / стальные трубы. Он также может быть использован в качестве пресс-сыпучих материалов, таких как макулатура / древесные отходы / мусор. Механически связанные исполнительные механизмы MRP перемещают подвижную часть к неподвижной, уникально размещая элементы, которые находятся между стенками пресса.
Горизонтальный пресс. Устройство большого размера для укладки / соединения / сжатия больших элементов, таких как бетонные колонны / стальные трубы. Он также может быть использован в качестве пресс-сыпучих материалов, таких как макулатура / древесные отходы / мусор. Механически связанные исполнительные механизмы MRP перемещают подвижную часть к неподвижной, уникально размещая элементы, которые находятся между стенками пресса.
 Позиционирование рулонов в бумажной или текстильной промышленности. Приводы ППМ определяют натяжение прокатываемого элемента путем толкания / перемещения подвижного ролика в процессе производства.
Позиционирование рулонов в бумажной или текстильной промышленности. Приводы ППМ определяют натяжение прокатываемого элемента путем толкания / перемещения подвижного ролика в процессе производства.
 Мобильная четырехколонная рампа, Четыре исполнительных механизма MRP наверху поднимают подход для целей обслуживания. Возможны исполнения с увеличенным количеством приводов для поддержки длинного транспортного средства, например локомотива.
Мобильная четырехколонная рампа, Четыре исполнительных механизма MRP наверху поднимают подход для целей обслуживания. Возможны исполнения с увеличенным количеством приводов для поддержки длинного транспортного средства, например локомотива.
 Ленточный конвейер. Привод MRP позволяет изменить путь, указанный на ленте продукта, чтобы изменить его пункт назначения. Можно сделать регулировки вверх-вниз и вправо-влево.
Ленточный конвейер. Привод MRP позволяет изменить путь, указанный на ленте продукта, чтобы изменить его пункт назначения. Можно сделать регулировки вверх-вниз и вправо-влево.
 засов, Устройство закрывает поток среды через диаметр или профиль, направляя закрывающий элемент / клапан вверх-вниз или вперед-назад.
засов, Устройство закрывает поток среды через диаметр или профиль, направляя закрывающий элемент / клапан вверх-вниз или вперед-назад.